





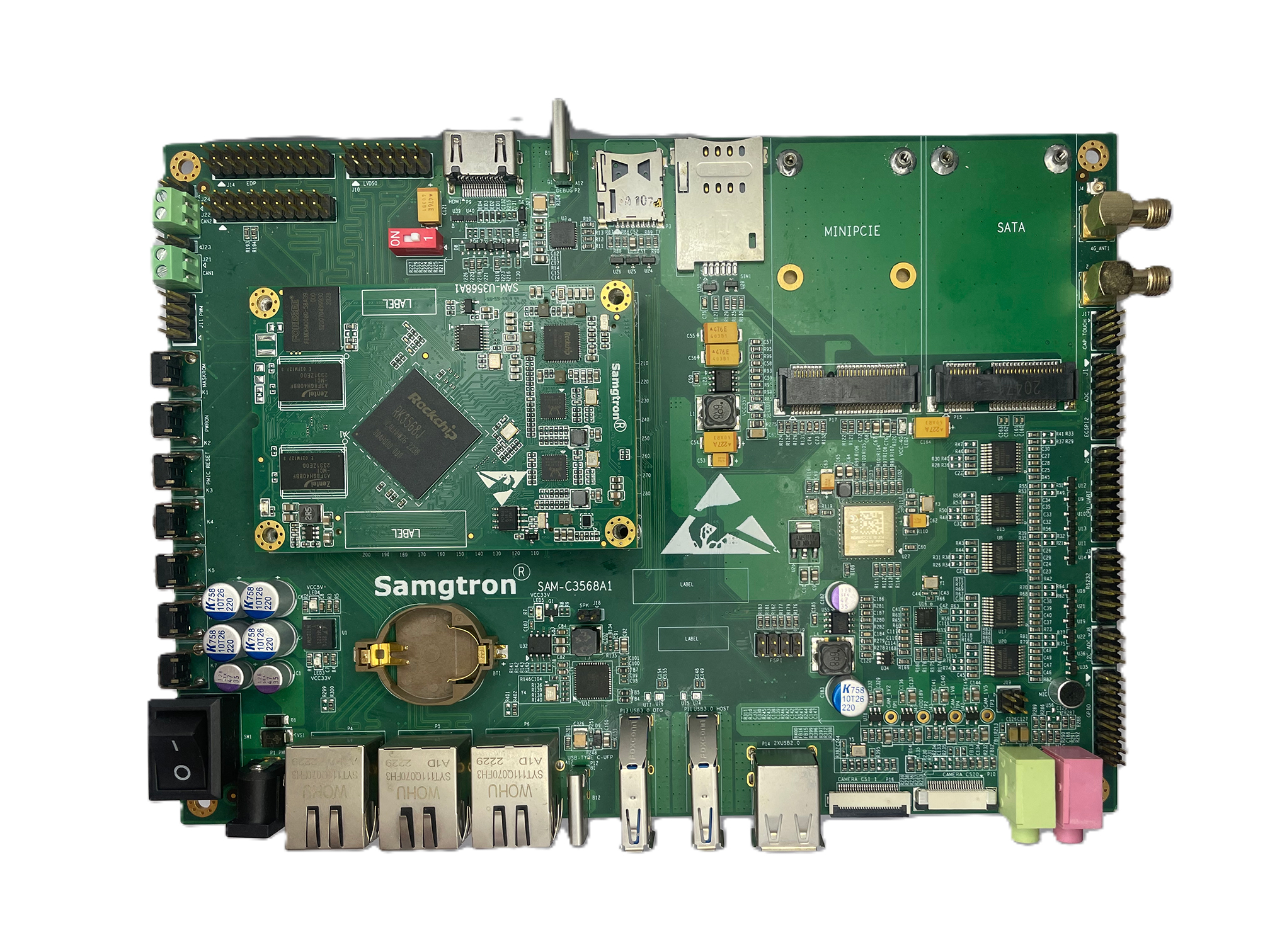

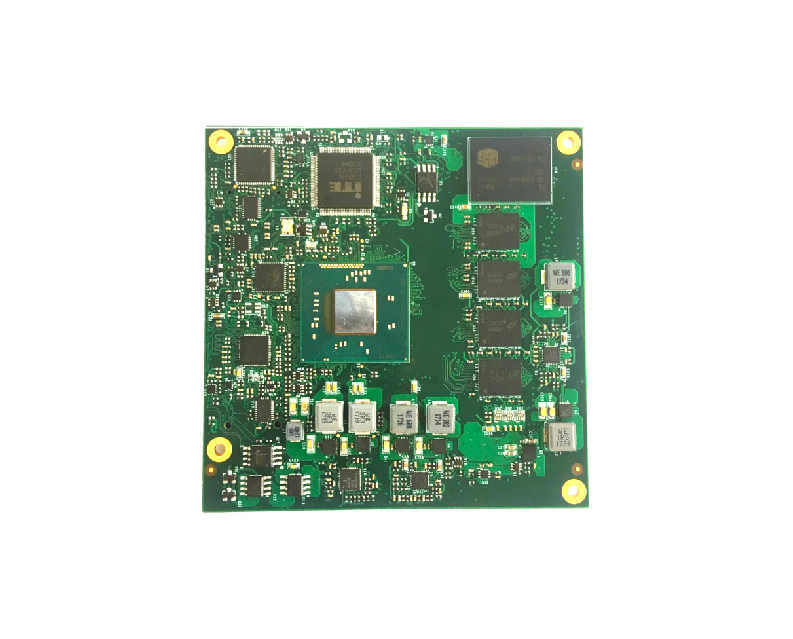



1. 为工业级实时控制量身定制的核心硬件架构:
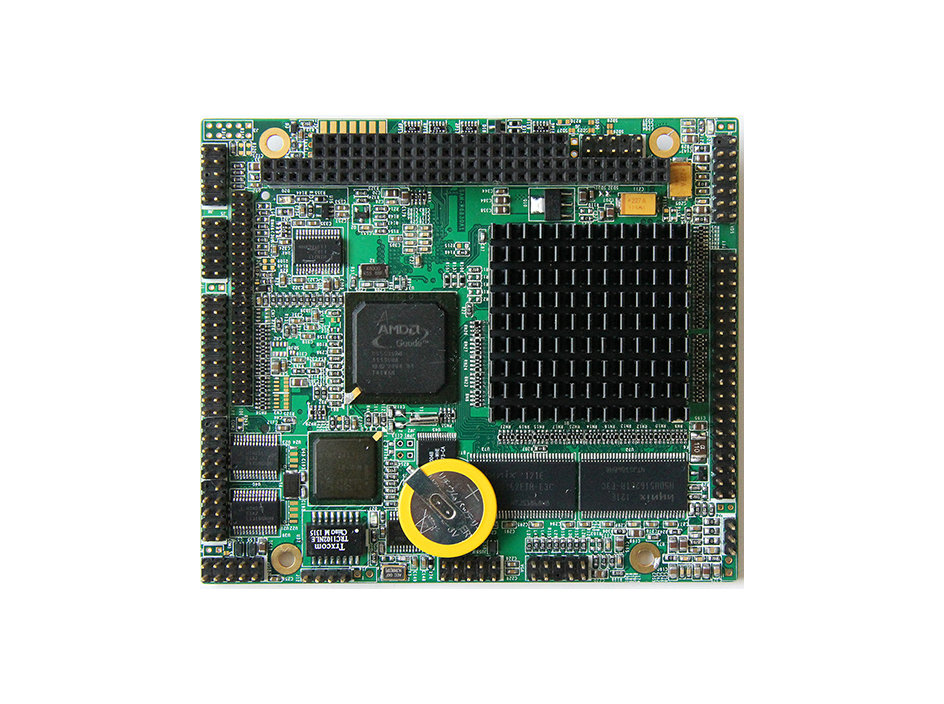
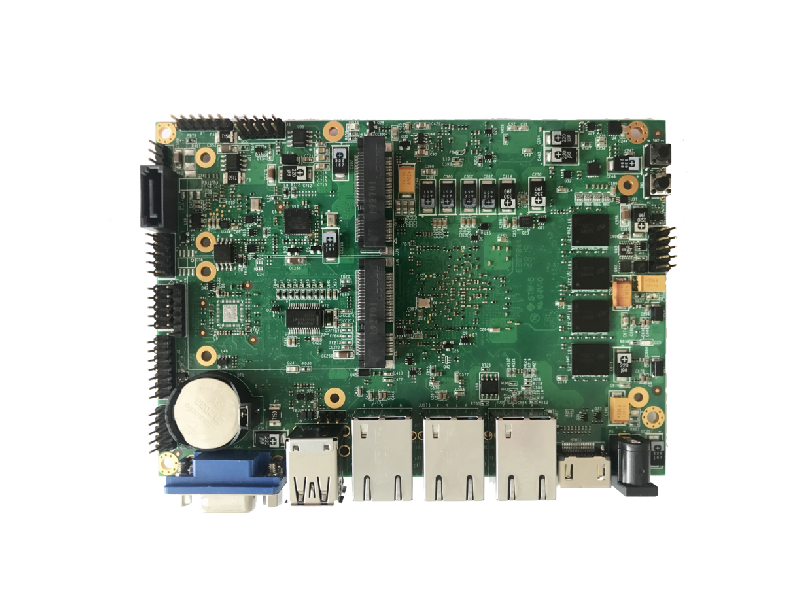
SAM-U3568A基于Rockchip RK3568四核Cortex-A55处理器(2GHz主频)构建,采用22nm先进制程,在功耗与性能间实现精准平衡。其1TOPs NPU算力单元支持INT8/INT16混合运算,为机器人系统的实时感知决策提供硬件加速。硬件设计上,板载4GB DDR4内存+32GB eMMC存储的组合,可满足复杂运动控制算法的高速数据缓存需求,同时确保程序代码的快速加载与长期稳定存储。
")
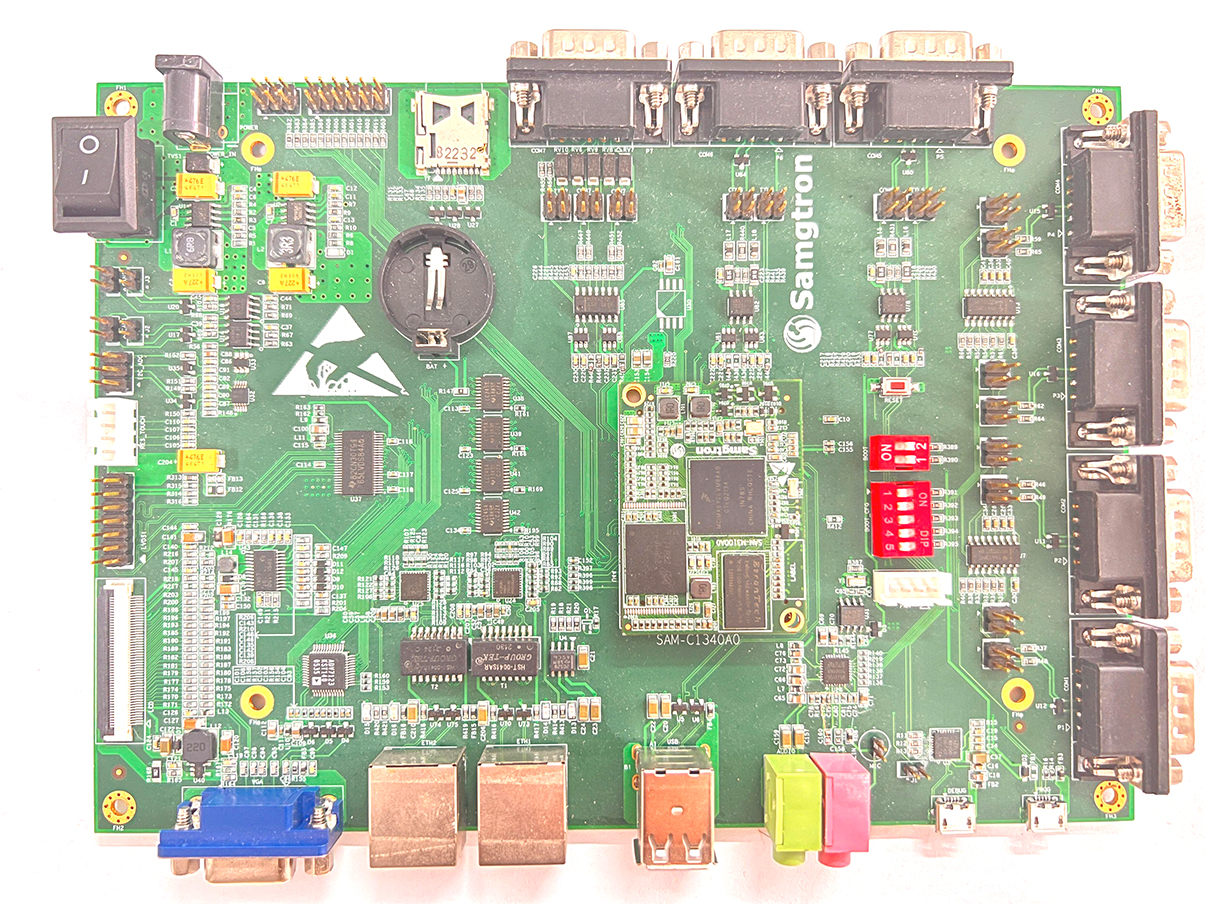
工业级接口的深度整合是其核心竞争力:
- 3路SATA3.0接口
支持工业级SSD扩展,满足多轴运动轨迹数据的海量存储需求 - 双千兆以太网PHY芯片
实现20ms级确定性网络响应,构建机器人与上位机的实时通信链路 - 8路UART+3路CAN2.0B
实现多传感器融合与现场总线集成,支持1024个I/O点的扩展能力 - PCIe3.0+USB3.0双通道
为视觉系统提供6Gbps级数据传输带宽
2. 实时操作系统:重构运动控制的时间精度
在Linux 5.10内核+实时补丁(RT-Preempt)的架构下,SAM-U3568A实现了μs级任务调度精度。通过硬件看门狗电路与-40°C~85°C宽温设计的协同,系统MTBF可达50万小时,满足汽车焊装线等严苛场景的7×24小时连续作业需求。
运动控制核心能力突破:
- 6轴协同插补算法
:利用Cortex-A55的NEON指令集加速,实现纳米级轨迹规划。 - 动态力矩补偿
:通过板载8通道PWM+12位ADC,支持1kHz力矩采样闭环控制。 - 碰撞预测算法
:NPU加速下的深度学习模型,实现10ms级碰撞预警响应。
3. 开发生态:工业自动化协议的深度适配
多语言编程框架的硬件级支持:
- IEC 61131-3全栈兼容
:通过FPGA协处理器实现ST/SFC等5种语言的指令周期优化。 - ROS2 Galactic集成
:基于PCIe接口的硬件加速层,将MoveIt运动规划耗时降低40%。 - Python实时扩展
:借助Cortex-A55的TrustZone技术,实现脚本语言与硬实时任务的资源隔离。
4. 可靠性设计:构建工业4.0的坚固基石
三重可靠性保障机制:
- 电源监控体系
:4.85-5.25V宽压输入范围,配合PMIC芯片实现±1%的电压纹波控制。 - 信号完整性优化
:LVDS/MIPI等高速接口采用阻抗匹配设计,误码率<10^-12。 - 故障容错架构
:双网口冗余、存储RAID1镜像、看门狗级联复位等机制组合。
实测性能指标:
振动测试:20-2000Hz/15g随机振动下无性能衰减。 EMC性能:±8kV接触放电、±15kV空气放电防护。 启动时间:从冷启动到运动控制就绪<800ms(含安全自检)。 ")
重新定义工业控制的可能性边界
SAM-U3568A通过异构计算架构(CPU+NPU+GPU)与工业级接口矩阵的创新融合,在机器人控制领域实现了三大突破:
该方案已成功应用于汽车焊装机器人、半导体晶圆搬运系统、电力巡检机械臂等高端场景,实测将运动控制周期缩短至0.5ms级,轨迹跟踪误差小于±0.03mm。随着工业4.0的深化,SAM-U3568A正在成为智能工厂不可或缺的"控制大脑"。
您在指挥系统建设中遇到过哪些棘手问题?欢迎留言!也可以联系我们的技术团队,获取定制化机器人控制解决方案。


